Dense Reconstruction Dataset
A pipe structure and a desk sequence provide visual, inertial & depth data, as well as ground truth for both the pose of the sensor head and the 3D scene. Download this dataset now
Users are kindly asked to cite the following paper, where the dataset has been introduced:
Marco Karrer, Mina Kamel, Roland Siegwart and Margarita Chli, “Real-time Dense Surface Reconstruction for Aerial Manipulation”, in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016. DOI E-citations
Available Data:
For each scene, this dataset provides: monochrome stereo images, inertial measurements from a MEMS IMU, depth data from a PMD Picoflexx time-of-flight camera and RGBD data from an Intel RealSense R200.
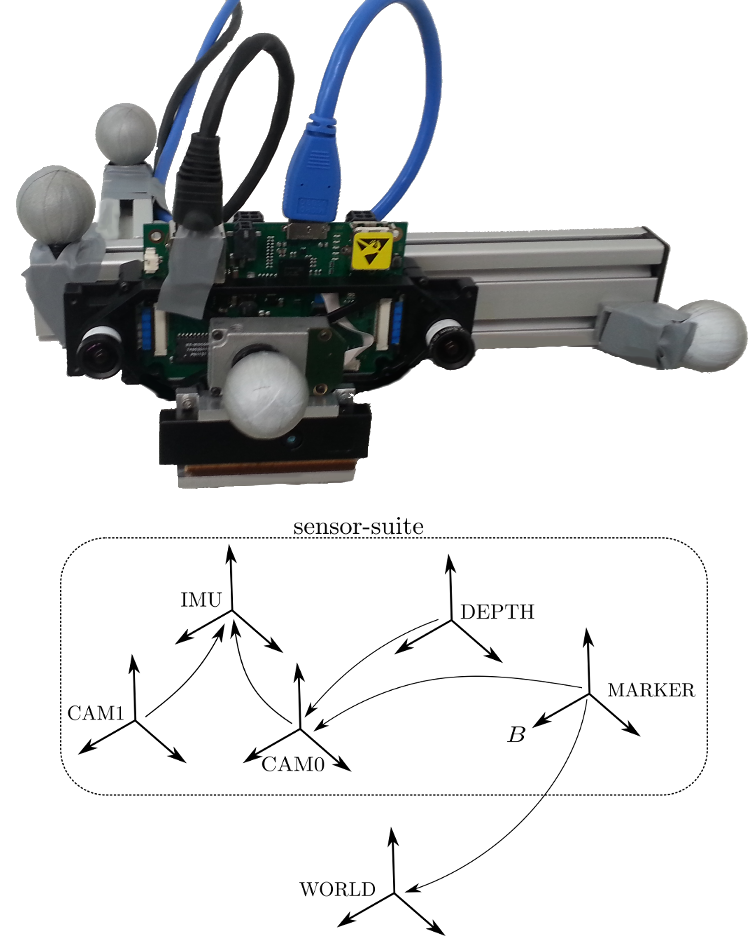
The ground truth of the sensor pose has been captured using a Vicon external tracking system, while the scene ground truth was captured by a Leica MS50 Theodolite Laser Scanner station (scans from different viewpoints have been aligned using the Iterative Closest Point algorithm).
Calibration parameters are provided for the camera intrinsics, the polynomial depth correction model, the camera-to-IMU extrinsics, the camera-to-depth sensor extrinsics and the camera-to-Vicon marker extrinsics.
The scene ground truth is stored as RGB point clouds in *.ply format. The sensor-readings as well as the 6DoF pose ground truth are stored as ROS *.bag files.
For any questions, please contact Marco Karrer.