Research

For the latest research developments of our work it is best to check out our Publications page and our external page Youtube channel for associated videos. Here, is an older overview of some of the projects at V4RL, indicative of some of the research directions in the lab.
The AEROWORKS project
external page AEROWORKS is a 3-year EU-Horizon2020 project in collaboration with academic and industrial partners in Europe. The project aims to develop a team of small Unmanned Aerial Vehicles ("Aerial Robotic Workers") equipped with visual and inertial sensors, as well as a robotic manipulator onboard. The goal is that this team collaboratively perceives its surroundings, developing autonomous navigation and coordination for autonomous inspection of infrastructure and maintenance.
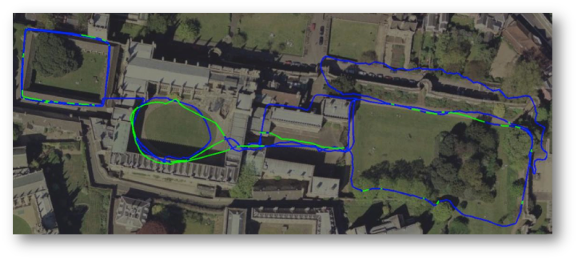
3D vision-based SLAM for UAV navigation
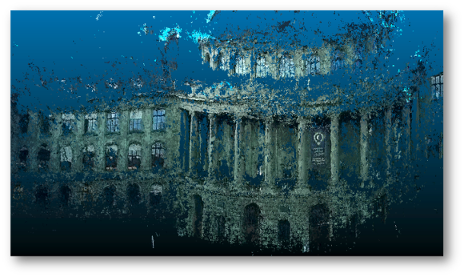
Goal: Estimate and track the motion of Unmanned Aerial Vehicles (UAVs) using vision-based SLAM techniques. Loop-closure detection, collision avoidance and the effect of high camera dynamics are some of the challenges we are facing before robust operation is possible.
Event-based cameras for Robot Navigation

Event-based cameras capture intensity changes, similarly to the human retina. We aim to exploit their favourable properties in tracking fast camera motion, for instance, for robot navigation.