ASL Releases SegMap
An open-source approach for localization in 3D point clouds
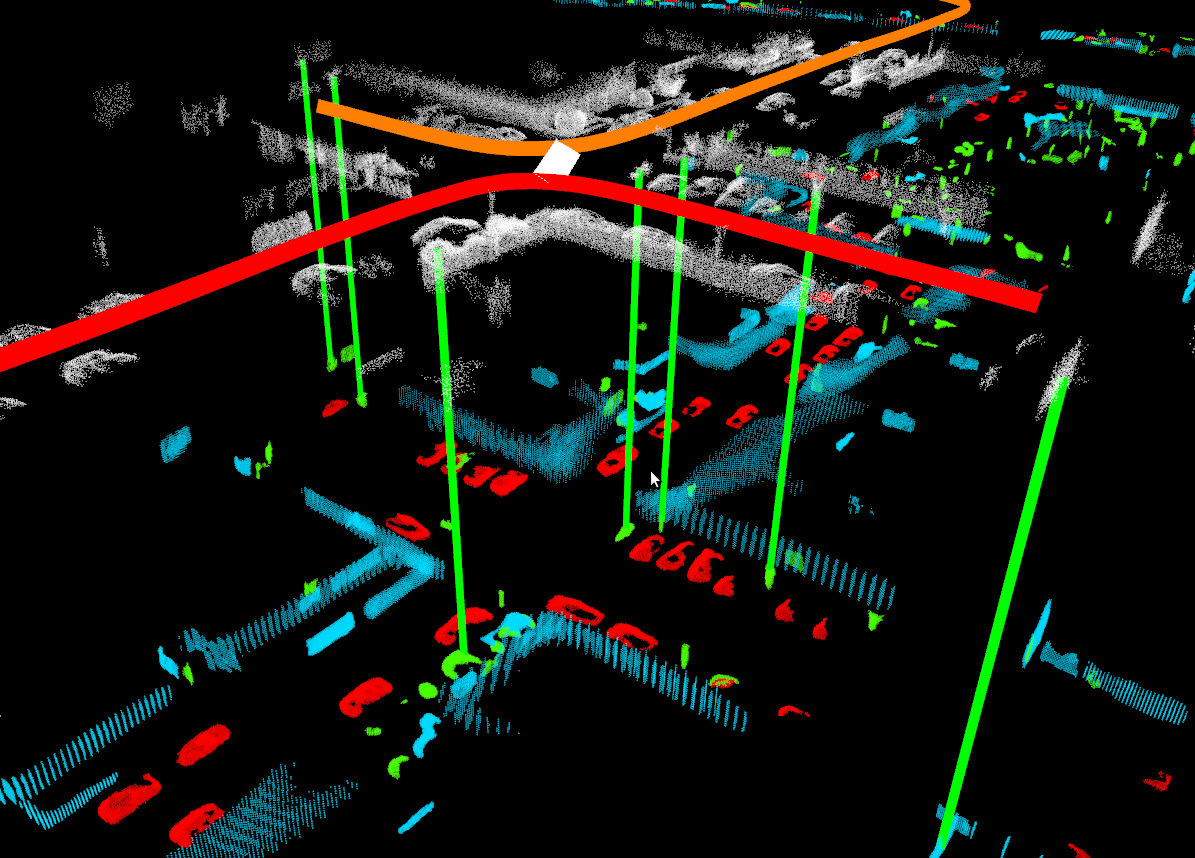
ASL is happy to announce the release of SegMap, an approach for localization in 3D point clouds. The technique is based on the extraction and matching of 3D segments allowing for robot localization, environment reconstruction, and semantics extraction. It has been extensively evaluated using 3D LiDAR data collected in urban driving and search and rescue scenarios.
external page Github
external page Paper
external page Video