Flying Robots
Running projects

Funding Program: SPI Technogrants
Partners: Laboratory of Hydraulics, Hydrology and Glaciology (ETH), Aarhus Univeristy, Denmark Spiez Laboratory
Abstract: A lack of reliable autonomous systems that can safely land a UAV over a rough and inaccessible
terrain, and perform measurement/sampling tasks is a significant roadblock that must be overcome
to enable widespread use of UAVs for in situ glacial monitoring. The
project proposed here aims to break through this roadblock by leveraging ETHZ’s expertise in
autonomous systems with Aarhus University’s experience in designing lightweight ice coring drills for
UAVs to develop a fully autonomous UAV ice sampling system
Website: -

Funding program: ETH Research Grants, Armasuisse Science and Technology
Partners: Institute for Building Materials, ETH Zurich
Abstract: The status of aging concrete infrastructure is a growing concern due to the rising amount of required inspection, and a lack of capacity to meet the need by traditional means. New technologies using non-destructive testing (NDT) contact sensors permit detection of corrosion far earlier than visual assessment. While aerial vehicles have already been embraced as a solution for efficient visual inspection of infrastructure, contact-based NDT still requires extensive human labor, road closures, and the use of large supporting inspection equipment. This project begins to bridge the gap through development of omnidirectional aerial vehicles combined with lightweight sensor technology. We aim to improve the safety, efficiency and economy of bridge inspection through the development of autonomous data collection techniques.
Website: We are currently creating a website for concrete inspection: Link

Funding program: NCCR Digital Fabrication (DFab) - Phase 2, Stream 1 ("On-Site Digital Fabrication"), Project A ("Lightweight Flexible Formworks")
Partners: Block Research Group (ETH), Institute for Building Materials (ETH)
Abstract: The main objective of this project is to apply concrete to geometrically complex, knitted textile formworks with unmanned aerial vehicles (UAVs) and guarantee adequate coverage via precise 3D navigation and accurate scanning of the surface build-up. The concrete will be supplied through a flexible pipe which is connected to a ground station or a crane from above. Depending on the type of concrete, the material can be applied by spraying or by smearing while in contact. Key challenges include accurate tracking of position and orientation during the application procedure while counteracting reaction forces and/or disturbance forces and carrying the payload of the application device.
Website: No specific website for this project, but for DFab in general: external page dfab.ch

Funding program: ETH Career Seed
Abstract: AERO-GUIDE is a research project aiming at enhancing Human-Aerial Robot Interaction. The project, created and led by Dr. Marco Tognon, is funded by the ETH Career Seeds grants and is carried out at the Autonomous System Lab (ASL) of ETH. AERO-GUIDE aims to be the first investigation into the novel research field of physical Human-Aerial Robot Interaction (pHARI). Although physical HRI with ground robots has been extensively investigated, the use of aerial robots demands a careful treatment of the interaction and the stability of the system. To start the investigation, we propose to study a system which is the first of its kind: a human holding a handle physically connected by a cable to an aerial vehicle. The robot shall guide the human using forces only, e.g., to help visually impaired persons.

Funding program: Marie Skłodowska-Curie Actions - Innovative Training Networks
Abstract: The AERO-TRAIN project is a Marie Skłodowska-Curie ITN project carried out by a consortium of 14 academic and industrial organizations from Denmark, Sweden, Norway, Finland, Spain, Italy and Switzerland. AERO-TRAIN aims to close the gap between the Infrastructure Operations & Maintenance industry and aerial robotics, with the ambition to keep our invaluable assets operational and safe. The project addresses the fundamental challenges of human-machine interface (e.g., immersive technology, augmented reality) and of precise and robust aerial manipulation for enhanced remote manipulation and inspection evaluation.
Joint Project with Microsoft Swiss Joint Research Center.
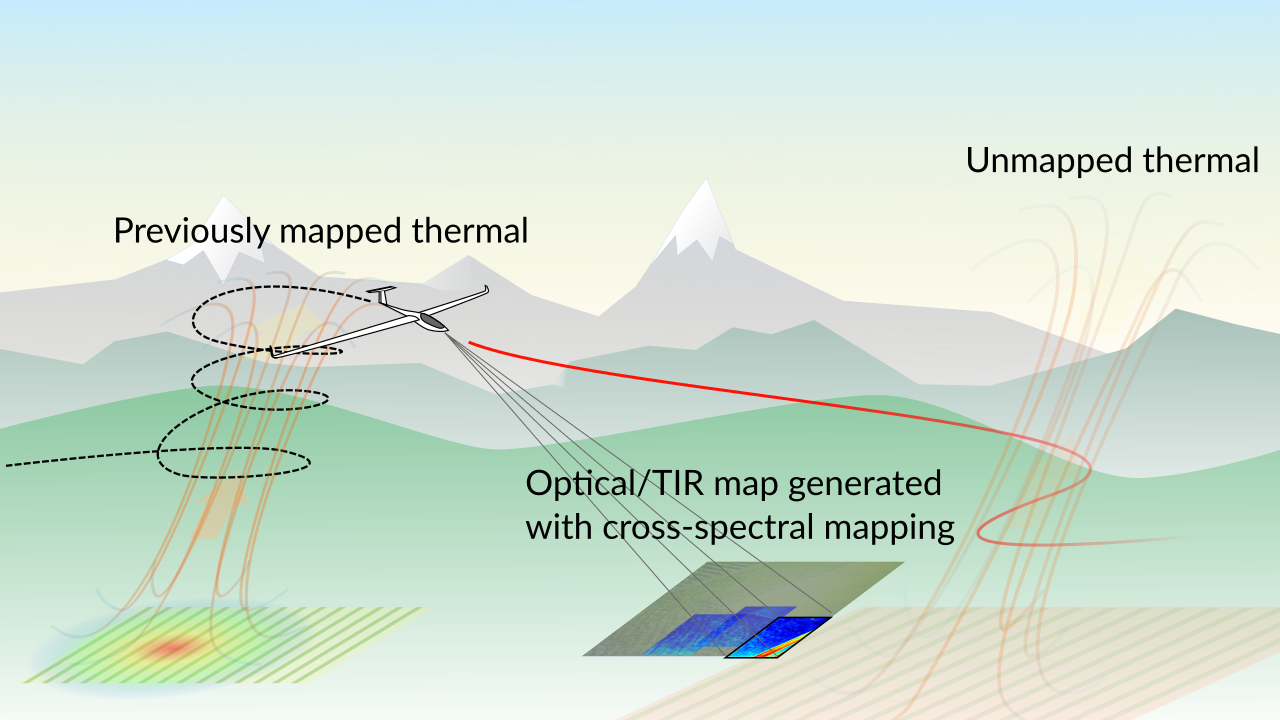
Vision has long been an integral capability of uninhabited aerial vehicles (UAVs). In its roles as a sensor for robot localization/obstacle avoidance or as a tool for accomplishing a mission (e.g., monitoring), vision has greatly increased the utility and safety of UAVs. At the same time, a major factor still restricting UAV utility is the amount of energy aboard, which limits the duration of their flights. Birds, from hawks to albatrosses, face largely the same problem. However, they are adept at using their vision to aid them in spotting -- and exploiting -- opportunities for extracting extra energy from the very air around them. As a result, they can stay aloft far longer than would otherwise be possible. This ability inspires Project Altair, which aims at developing infrared (IR) sensing techniques for detecting, mapping and exploiting naturally occurring thermal updrafts for long endurance flights of fixed-wing UAVs.

Joint research with external page WSL Institute for Snow and Avalanche Research SLF.
Snow avalanches kill, on average, 22 people per year in the Swiss Alps alone. This makes them the most deadly natural hazard, responsible for more than one third of all natural hazard fatalities. The main source of information on avalanche hazard in Switzerland for authorities, safety personnel of ski resorts and traffic lines, as well as the public, is the avalanche bulletin of the WSL Institute for Snow and Avalanche Research SLF. Spatially continuous, near real-time information on avalanche activity, which would be key information for the bulletin, is not available today due to the remoteness of many alpine regions. The AvalMapper project aims to fill this gap by creating an aerial system for collecting high-resolution avalanche occurrence data over affected regions in the Swiss Alps. The partners aim to develop and test a long-endurance (multi-hour) autonomous aircraft that will use on-line adaptive planning techniques and machine learning to identify and map avalanches using near-infrared imagery.
Completed projects

The AtlantikSolar project aims to develop a small (5.6m) hand-launchable fixed-wing Unmanned Aerial Vehicle that can stay airborne for up to 10 days continuously by employing solar-electric propulsion techniques and advanced flight control and navigation technology. This ultra-long flight endurance is of prime interest in large-scale search and rescue (SaR) support, wildfire detection or meteorological surveys above otherwise inaccessible oceans. AtlantikSolar was already used within European SaR research projects ICARUS and SHERPA, where it provided live-imagery to SaR first response teams on the ground to improve the rescue-mission planning. The final goal of the project is to demonstrate multi-day flight in sub-optimal conditions and with payloads. A central vision is to demonstrate the first-ever Atlantic Crossing – a journey of 4 days and more than 4000km - with a solar-powered Unmanned Aerial Vehicle. The aircraft, its avionics and related algorithms are developed at ETH Zurich’s Autonomous Systems Lab in cooperation with multiple partners from industry, academia and hobbyist communities world-wide.

With ageing infrastructure in developing-and-developed countries, and with the gradual expansion of distributed installations, the costs of inspection and repair tasks have been growing vastly and incessantly. To address this reality, a major paradigm shift is required, in order to procure the highly automated, efficient, and reliable solutions that will not only reduce costs, but will also minimize risks to personnel and asset safety. AEROWORKS envisions a novel aerial robotic team that possesses the capability to autonomously conduct infrastructure inspection and maintenance tasks, while additionally providing intuitive and user-friendly interfaces to human-operators.
The AEROWORKS robotic team will consist of multiple heterogeneous “collaborative Aerial Robotic Workers”, a new class of Unmanned Aerial Vehicles equipped with dexterous manipulators, novel physical interaction and co-manipulation control strategies, perception systems, and planning intelligence. This new generation of worker-robots will be capable of autonomously executing infrastructure inspection and maintenance works.
The AEROWORKS multi-robot team will operate in a decentralized fashion, and will be characterized by unprecedented levels of reconfigurability, mission dependability, mapping fidelity, and manipulation dexterity, integrated in robust and reliable systems that are rapidly deployable and ready-to-use as an integral part of infrastructure service operations.
As the project aims for direct exploitation in the infrastructure services market, its results will be demonstrated and evaluated in realistic and real infrastructure environments, with a clear focus on increased Technology Readiness Levels. The accomplishment of the envisaged scenarios will boost the European infrastructure sector, contribute to the goal of retaining Europe’s competitiveness, and particularly impact our service and industrial robotics sector, drastically changing the landscape of how robots are utilized.
More information can be found on the external page Aeroworks Website.

The aim of the Flourish project is to fill the gap between the current and desired capabilities of agricultural robots by introducing an adaptive robotic solution for precision farming. By combining aerial surveying using a small Unmanned Aerial Vehicle (UAV) with a multi-purpose agricultural Unmanned Ground Vehicle (UGV), the developed system will be able to survey a field from the air and perform targeted intervention on the ground.
The system can also be utilized to a wide range of agricultural management activities and different crops by choosing different sensors, status indicators, and ground treatment packages. The gathered information can be exploited alongside existing precision agriculture machinery, for example, by providing position maps for fertilizer application.
The Flourish project is one of Horizon 2020 EU projects and consists of 7 partners that have expertise in various research fields such as UAV and UGV perception, navigation for agriculture, selective de-weeing/spraying. ETH Zurich's Autonomous Systems Lab is the project coordinator and is working on UAV perception and navigation work packages.
More details regarding the project can be found on the official external page project webpage.
external page Aerial Service Robots
The goal of the AIRobots project is to develop a new generation of aerial service robots capable to support human beings in all those activities which require the ability to interact actively and safely with environments not constrained on ground but, indeed, freely in air. The step forward with respect to the "classical" field of aerial robotics is to realize aerial vehicles able to accomplish a large variety of applications, such as inspection of buildings and large infrastructures, sample picking, aerial remote manipulation, etc.
The starting point is an aerial platform whose aeromechanical configuration allows the vehicle to interact with the environment in a non-destructive way and to hover close to operating points. Rotary-wing aerial vehicles with shrouded propellers represent the basic airframes which will be then equipped with appropriate robotic end-effectors and sensors in order to transform the aerial platform into an aerial service robot, a system able to fly and to achieve robotic tasks.
Advanced automatic control algorithms will be conceived to govern the aerial platform which will be remotely supervised by the operator with the use of haptic devices. Particular emphasis will be given to develop advanced human-in-the-loop and autonomous navigation control strategies relying upon a cooperative and adaptive interaction between the on-board automatic control and the remote operator. Force and visual feedback strategies will be investigated in order to transform the aerial platform in a "flying hand" suitable for aerial manipulation.
Download Project poster (PDF, 957 KB)
Autonomous micro flying robots combine a large variety of technological challenges and are therefore an excellent showcase for leading edge
micro/nano technologies and their integration with information technology towards a fully operational intelligent micro-system. This project proposes, therefore, the development and implementation of the first fully autonomous micro helicopter comparable in size
and weight to a small bird. The key challenges of the project include innovative concepts for power sources, sensors, actuators, navigation and helicopter design and their integration into a very compact system. The envisaged fully autonomous micro-helicopter will weight less than 30g and measure only 10cm in diameter. The project shall develop and demonstrate innovative approaches and technologies in:
- system level design and optimization of autonomous micro aerial vehicles,
- multifunctional use of components (integration of camera and distance sensor, batteries doubling as structural elements, or a propeller used for gyroscopic stabilization),
- design of "smart" miniature inertial sensors and omnidirectional vision
sensors with polar pixel arrangement, - miniaturized fuel-cells,
- miniaturized piezoelectric actuators with enhanced power to weight
ratios, and - control and navigation concepts that can cope with limited sensor and
processing performance.
The final system is expected to find applications in surveillance of buildings and large indoor areas that are difficult to access on wheels or legs, rescue missions in buildings after natural disasters or terror attacks, surveillance of dangerous areas, chemical and nuclear plants or law enforcement in public areas. The resulting micro-helicopter will represent the first demonstration of a fully autonomous indoor flying robot of its size and its successful realization will be a landmark achievement in integrated micro/nano technology and micro aerial vehicles.

external page Personal Aerial Transport
The myCopter project aims to pave the way for personal aerial vehicles (PAVs) to be used by the general public within the context of such a transport system. The project consortium consists of experts that can make the technology advancements necessary for a viable PATS, and a partner to assess the impact of the envisioned PATS on society (socio-technological evaluation). To this end, test models of handling dynamics for potential PAVs will be designed and implemented on unmanned aerial vehicles, motion simulators, and a manned helicopter. In addition, an investigation into the human capability of flying a PAV will be conducted, resulting in a user-centred design of a suitable human-machine interface (HMI). Furthermore, the project will introduce new automation technologies for obstacle avoidance, path planning and formation flying, which also have excellent potential for other aerospace applications. This project is a unique integration of technological advancements and social investigations that are necessary to move public transportation into the third dimension.
Partners
- external page Max-Planck-Institut für biologische Kybernetik
- external page The University of Liverpool
- external page École Polytechnique Fédérale de Lausanne
- external page Eidgenössische Technische Hochschule Zürich
- external page Karlsruher Institut für Technologie
- external page Deutsches Zentrum für Luft- und Raumfahrt
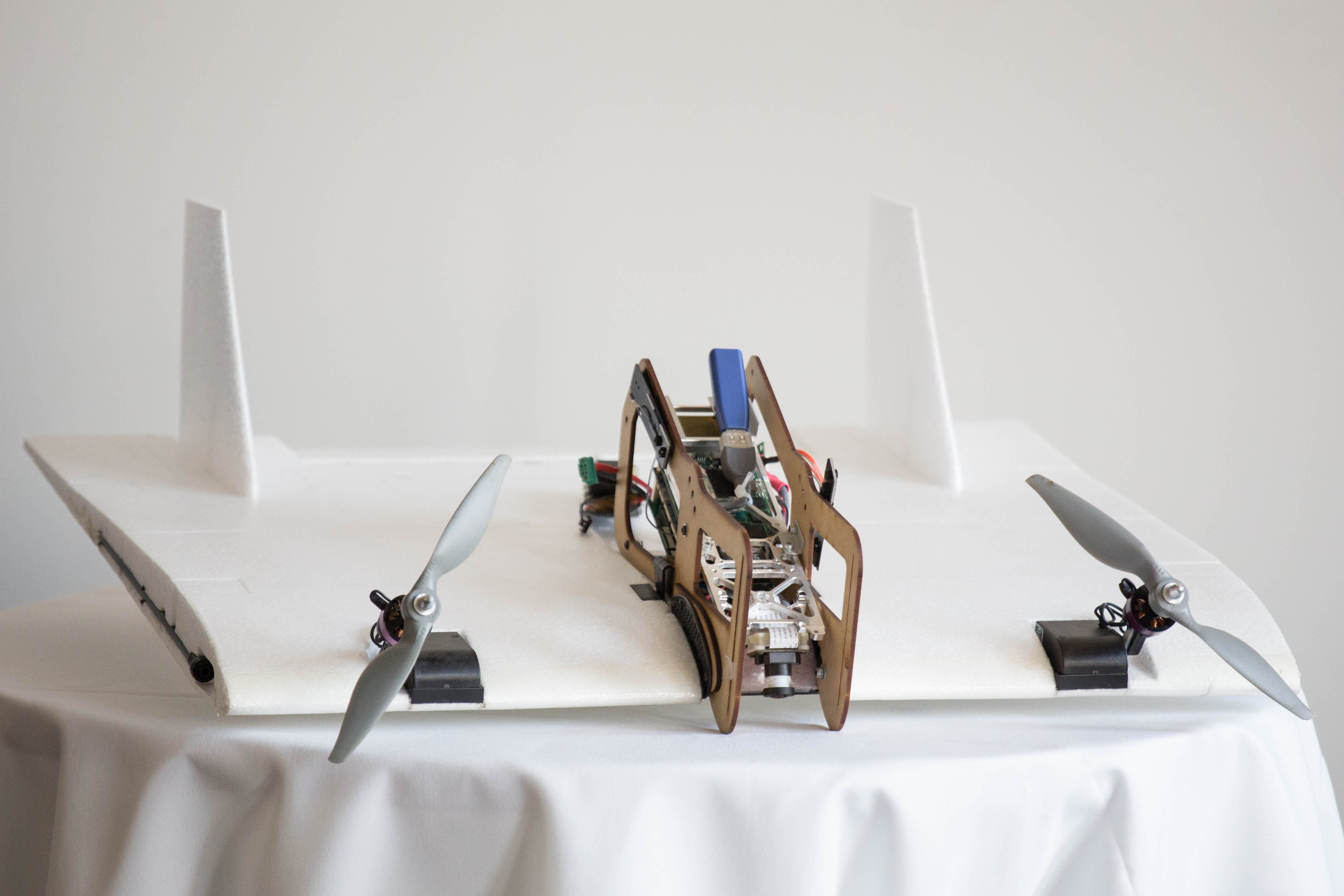
UAV VTOL Glider. As a result of this project, a spin-off has been founded! external page Website

external page Swarm of Flying Robots
Fully autonomous operation for autonomous micro helicopters in cities or other dense environments requires the micro helicopter to fly at low altitude or indoors (without GPS) to actively explore unknown environments while avoiding collisions and creating maps. The goal is the capabitlity of coordinated flight in small swarms.

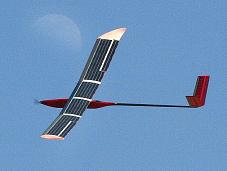
The goal of this project is to design and build a solar powered micro airplane for autonomous exploration. This system, named Sky-Sailor, is fully autonomous in navigation and power generation. Equipped with solar cells covering its wing, it retrieves energy from the sun in order to supply power to the propulsion system and the control electronics, and charge the battery with the surplus of energy. During the night, the only energy available comes from the battery, which discharges slowly
until the next morning when a new cycle starts.
This project started in 2004 under a contract with European Space Agency to study the feasibility of a Martian Solair Airplane. A lot of work was done on the optimization of the various elements of the energy chain, from the solar celsl to the propeller. The actual prototype weighs 2.4 kg for a wingspan of 3.2 meters. The 216 silicone solar cells are able to deliver up to 90 W at noon during summer whereas the power consumption of the airplane is 16 W at level flight. In June 2008, the objective of Sky-Sailor was reached. The airplane flew more than 27 hours continuously and autonomously. This 874 km flight proved for the first time that it is feasible to stay in the air with the only use of solar energy, and at constant altitude, without the help of altitude gain before the night or thermal soaring.
Report of the 27h flight Download [pdf] (PDF, 117 KB)
Article on ETH Life [link]
Article in the Zürcher Tagblatt Download [pdf] (PDF, 2.7 MB)
Article in the Aviation Magazine Download [pdf] (PDF, 197 KB)
Article in La Côte Download [pdf] (PDF, 1 MB)
Schedule:
Spring 2004 : feasibility study
Summer 2004 - Spring 2005 : Design and realization of the lightweight structure and the solar generator (Solar Panels, MPPT,Battery)
Summer 2005 : Test of the first prototype using MP2028g autopilot, validation of the concept
Fall 2005 - Summer 2006 : Development of our own Autopilot hardware, Creation of an aerodynamic model of the airplane, development of a model-based controller and realization of the ground control station
Summer 2006 - Spring 2007 : Tests and improvement of hardware, reliability checks and preparation for 24h flight
Summer 2008 : Successful 27 hours flight.
New publications:
- Noth, André, Siegwart, Roland, Design of an Ultra-Lightweight Autonomous Solar Airplane for Continuous Flight, Aircraft & Spacecraft Systems Design Lecture Notes, Zurich, Switzerland, December 2006. Download [pdf] (PDF, 663 KB)
- Noth, André, History of Solar Flight, Aircraft & Spacecraft Systems Design Lecture Notes, Zurich, Switzerland, December 2006. Download [pdf] (PDF, 420 KB)
Phd Thesis
- Noth, André, Download Design of Solar Powered Airplanes for Continuous Flight (PDF, 19.1 MB), Phd Thesis, Autonomous Systems Lab, ETHZ, Zurich, Switzerland, Oktober 2008.